

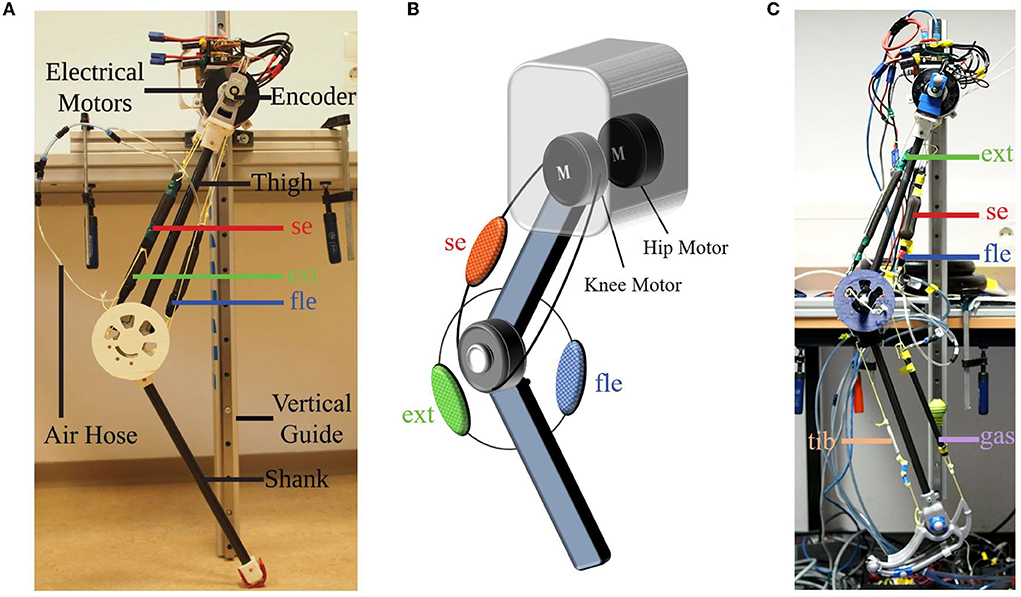
A Control Strategy for Pneumatically Powered Below-Hip Orthosis

Sistema de classificação de cores composto por um conjunto de redes
Frontiers Exploring the effects of serial and parallel
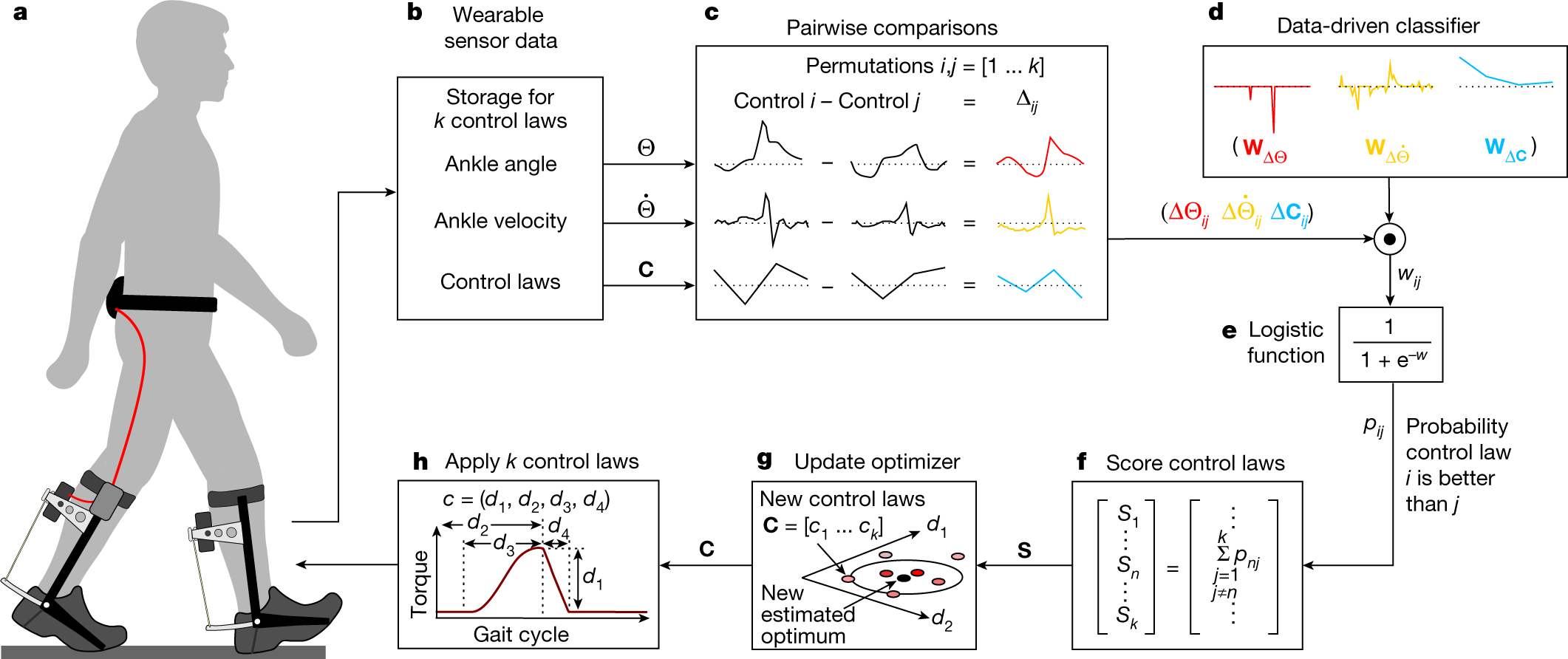
Personalizing exoskeleton assistance while walking in the real

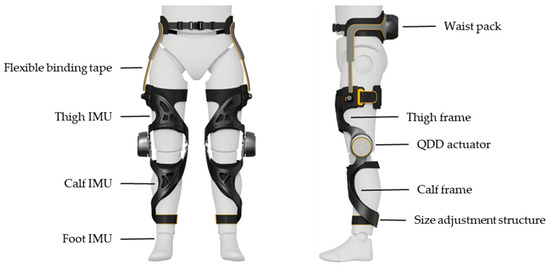
Frontiers A Wearable Soft Robotic Exoskeleton for Hip Flexion
Sensors, Free Full-Text

Steve Heim's research works Massachusetts Institute of Technology, MA (MIT) and other places

Sensors, Free Full-Text

Assist-As-Needed control of a hip exoskeleton based on a novel

Actuators, Free Full-Text

a) A typical insect leg consists of four actively movable segments

Table 2 from Towards dynamic trot gait locomotion: Design, control

Felix RUPPERT, Ph.D Student, Master of Science, Max Planck Institute for Intelligent Systems, Stuttgart, IS, Dynamic locomotion group

The two-segment leg has a torque-controlled actuator at the hip







